Abstract
従来のマルチプロジェクタ較正(キャリブレーション)では、各プロジェクタごとに構造化光パターンを順番に投影・撮影する必要があるため、プロジェクタ数の増加に伴い較正時間と作業量が線形に増大していました。このスケーラビリティの問題は、大規模なプロジェクションマッピングシステムの展開を長年妨げてきました。 本研究では、この制約を打破する新しい較正手法を提案します。提案手法では、較正儀(キャリブレーションボード)の表面にカメラを埋め込み、埋め込みカメラが入射する投影光を直接観測することで、複数プロジェクタから同時に投影された構造化光パターンを入射方向に基づいて分離します。これにより、埋め込みカメラの光学中心とプロジェクタ画素との対応付けを行い、全プロジェクタの内部・外部パラメータを同時推定できます。 さらに、キャリブレーションボード表面とカメラ光学中心の微小な位置ずれを補正する手法も導入しました。その結果、従来手法と同等の較正精度を維持しながら、必要な投影・撮影回数をプロジェクタ数に対してほぼ一定に抑えることができます。これにより、高輝度スタッキング表示、超解像表示、ライトフィールド表示、影抑制表示など、投影領域が重なり合う高密度マルチプロジェクタシステムにおいて、劇的なスケーラビリティ向上を実現します。
ポスター(フル解像度版)
Principle
プロジェクタ1が投影すると、その赤色光はターゲット表面で拡散反射し、あらゆる方向へ散乱します。カメラには赤い画素として記録されます。
ここにプロジェクタ2から青色光を投影すると、両者の散乱光が同じカメラ画素上で混ざり合い、紫色として観測されます。このとき、どの色がどのプロジェクタから来たのかを区別することはできません。これが、複数プロジェクタからの同時投影が困難な理由です。
私たちのアイデアは、カメラそのものをキャリブレーションボードにすることです。
カメラをボード内部に埋め込み、その光学中心がボード表面と一致するように配置します。レンズはボード表面と面一になるように設置され、撮像素子はその背後に配置されます。つまり、カメラはターゲットを観測する存在ではなく、ターゲットそのものになります。
このとき、異なるプロジェクタから来た光はボード上の同一点を通過しても、入射角の違いによって撮像素子上の異なる画素に到達します。この原理が提案手法の核心です。
しかし実際には、光学中心はボード表面と完全には一致していません。また、プロジェクタ位置が変化すると、光線の交差位置も表面上を移動します。そのため、「1台の埋め込みカメラ=1つの固定点」という単純な仮定は成り立ちません。
そこで、事前にこのずれを補正します。1台のプロジェクタを$K$箇所の異なる位置に配置し、それぞれについてカメラ座標とボード上座標の対応を取得します。両者は射影変換で関係付けられるため、ホモグラフィ$M_n$を推定します。この処理は各埋め込みカメラについて一度だけ行えば十分です。
実際の較正時には、新たなプロジェクタからの光によって埋め込みカメラ上の画素$c$が観測されます。この画素を$M_n$によって変換することで、真のボード表面座標$x$を復元し、キャリブレーションボードのワールド座標として利用します。
Experimental setup
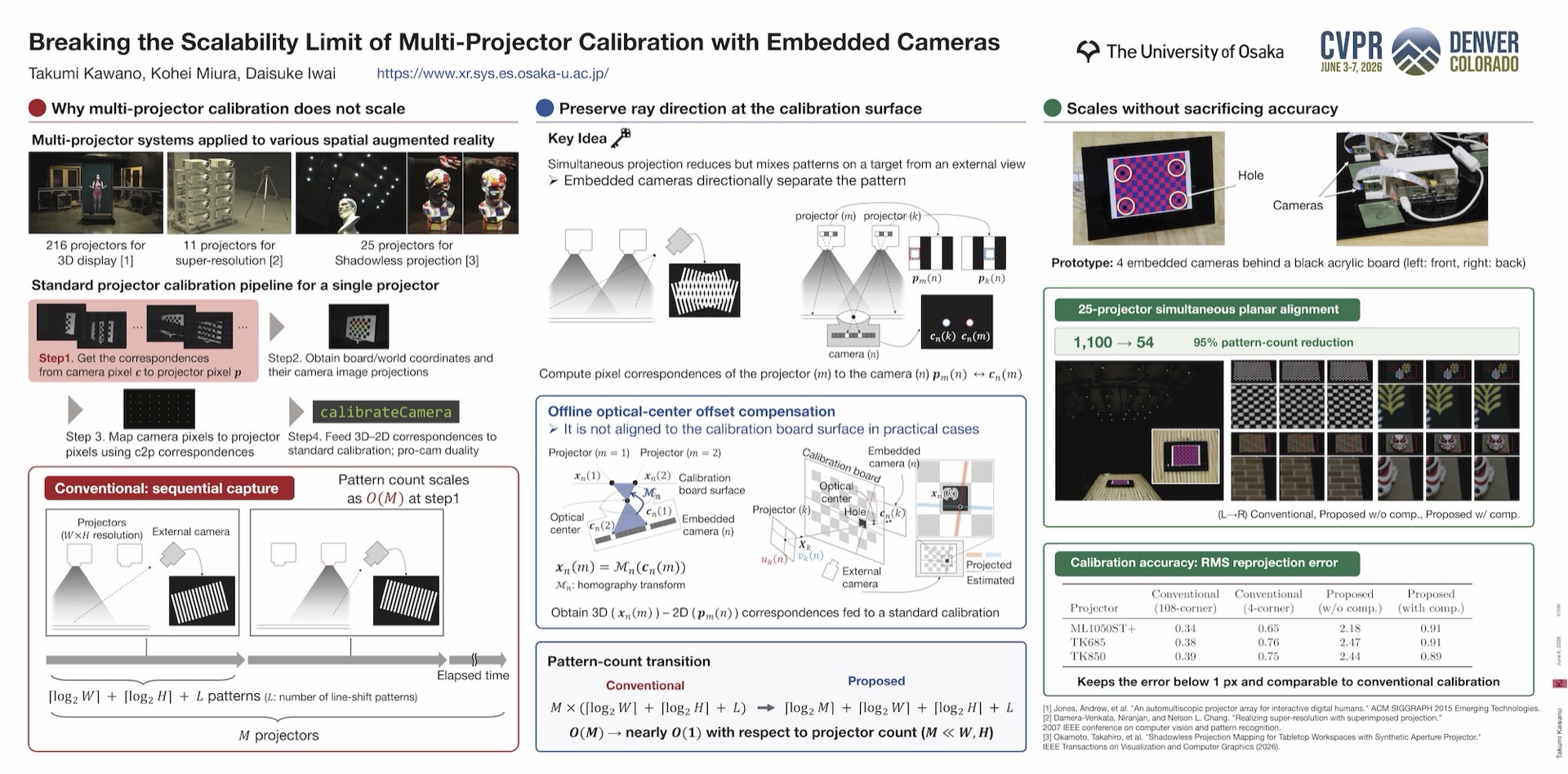
キャリブレーションボードのプロトタイプ。黒色アクリル板に4台のカメラを埋め込んでいます。
Results
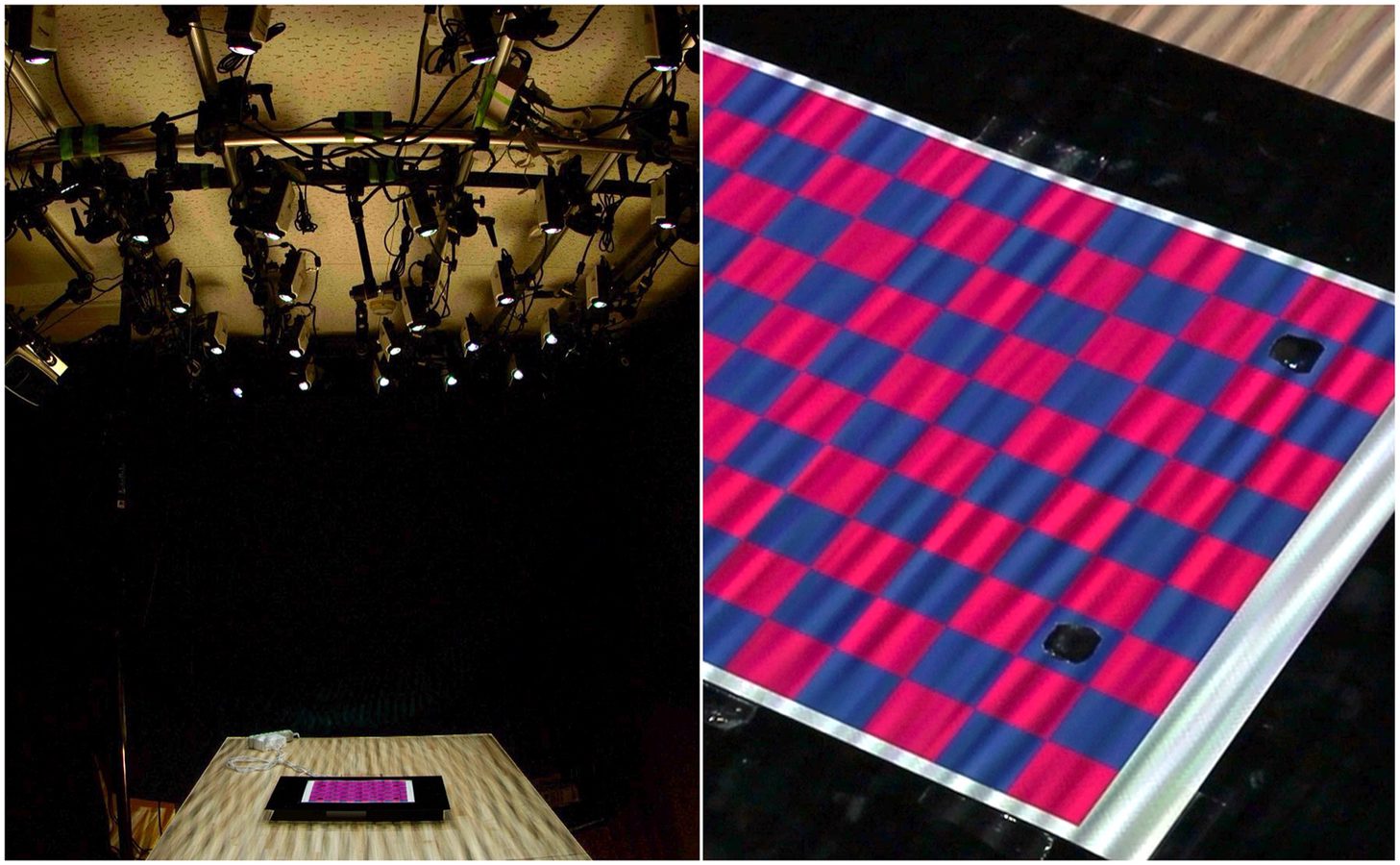
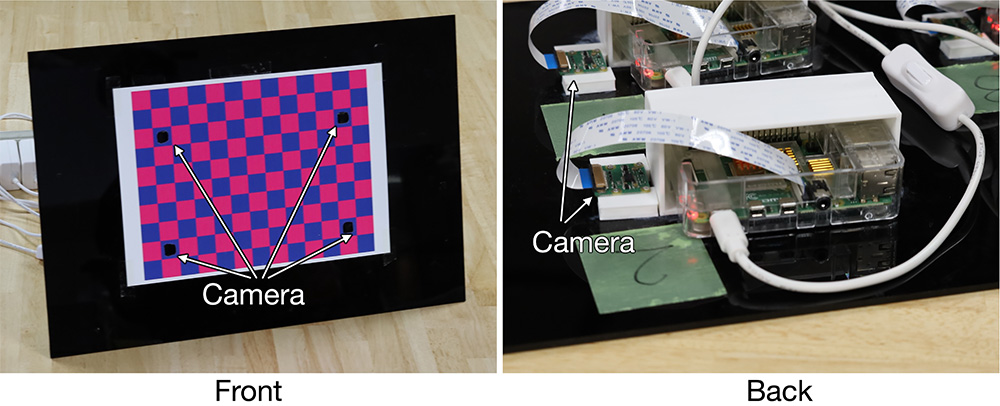
25台のプロジェクタを用いたグレイコード投影実験
(上)較正時のグレイコード投影です。従来法では1台ずつグレイコードパターンを投影します(左、矢印は現在投影中のプロジェクタを示します)。一方、提案手法では25台のプロジェクタから同時にグレイコードパターンを投影します(右)。(下)較正後の位置合わせ結果です。25台すべてのプロジェクタから同一画像コンテンツを投影しています。
3台のプロジェクタを用いたラインシフト投影実験
屋外環境光に対するロバスト性評価
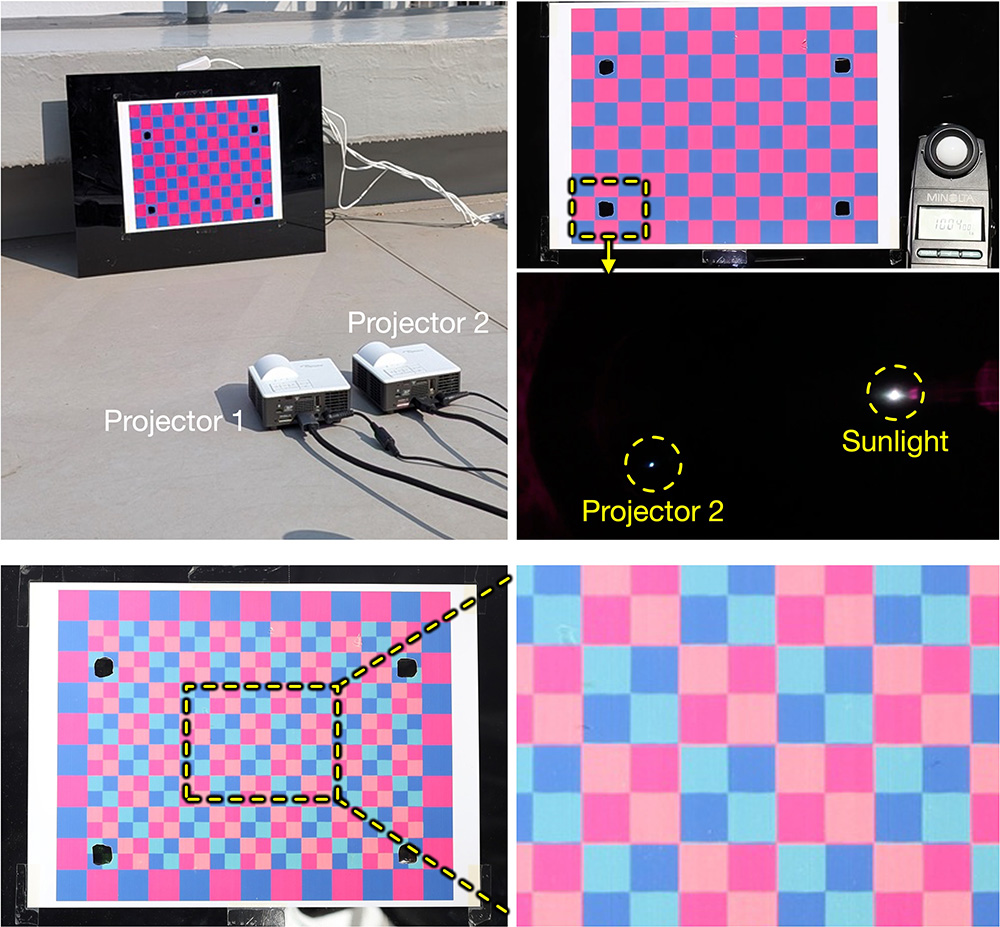
本実験は、夜間のプロジェクションマッピングイベントに先立って日中に較正を完了する場合など、明るい環境下での較正を想定しています。(上)直射日光下での実験環境です。キャリブレーションボードに対して同時にGray-codeを投影している様子を示しています。ボード上では投影パターンは環境光によって埋もれ、肉眼では見えませんが、埋め込みカメラによる撮影画像では投影光を観測できます。この時点では、プロジェクタ2が白色ストライプ、プロジェクタ1が黒色ストライプを投影しているため、カメラ画像中ではプロジェクタ2と太陽のみが明るい輝点として観測されています。(下)直射日光を遮った状態で撮影した位置合わせ結果です。提案手法により推定されたホモグラフィに基づいて位置合わせを行い、2台のプロジェクタから同一のハーフスケールチェッカーボードパターンを同時投影しています。
BibTeX
@inproceedings{kawano2026breaking,
author = {Takumi Kawano and Kohei Miura and Daisuke Iwai},
title = {Breaking the Scalability Limit of Multi-Projector Calibration with Embedded Cameras},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
pages = {21573--21582},
year = {2026}
}